
지난 6월 대만 고속도로를 자율주행하던 테슬라 모델 3 차량이 전복된 대형 트럭을 그대로 추돌하는 사고가 발생했습니다. 최첨단 기술을 자랑했던 테슬라의 사고를 보면서 자율주행 안전성 평가에 대한 논란이 대두되고 있습니다. 자율주행 프로세스와 그 중에서도 인지도 평가를 어떻게 할 것인지에 대해 알아보겠습니다.
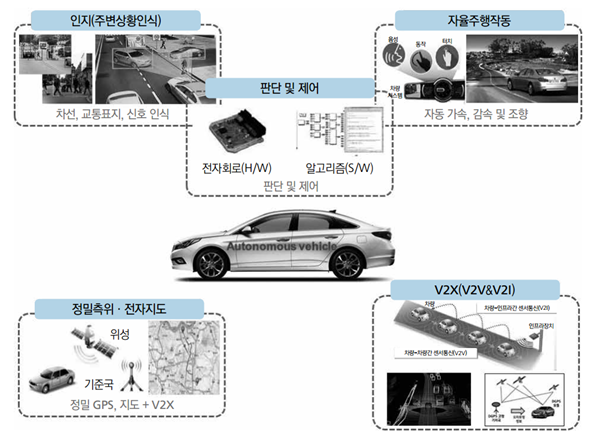
자율주행 프로세스의 자율주행은 인지, 판단, 제어의 3단계 프로세스로 이루어집니다. 우선 인지는 인간의 눈이나 귀 등의 감각 기관에 해당됩니다. 다양한 센서로 입력된 데이터 신호의 값을 처리해 주행 환경이나 장애물 등 주변의 모든 물체의 존재를 인식하는 것을 말합니다. 인식된 값을 바탕으로 장애물의 종류와 거리, 속도, 방향 등을 파악합니다.판단은 인간의 뇌에 해당합니다. 눈과 귀로 입력된 정보로 판단합니다. 주행 경로상에 장애물이 인지되면 현재 유지하고 있는 주행 상태를 유지/변경할지 결정하고 안전한 주행을 위해 브레이크, 조향 장치 등을 적절히 제어하기 위한 데이터 값을 결정합니다.
제어는 인간의 팔, 다리에 해당합니다. 인지 – 판단을 거쳐 정해진 데이터 값에 따라 실제 자율주행차의 주행 상태를 변경합니다. 스티어링(가로방향) 제어, 가/감속(세로방향) 제어를 수행합니다.자율주행차는 인지-판단-제어를 쉬지 않고 반복합니다. 이 3단계 프로세스 중 가장 기본적이면서도 가장 중요한 인지도에 대해 알아보겠습니다.
[그림 1] 자율주행 프로세스 개요
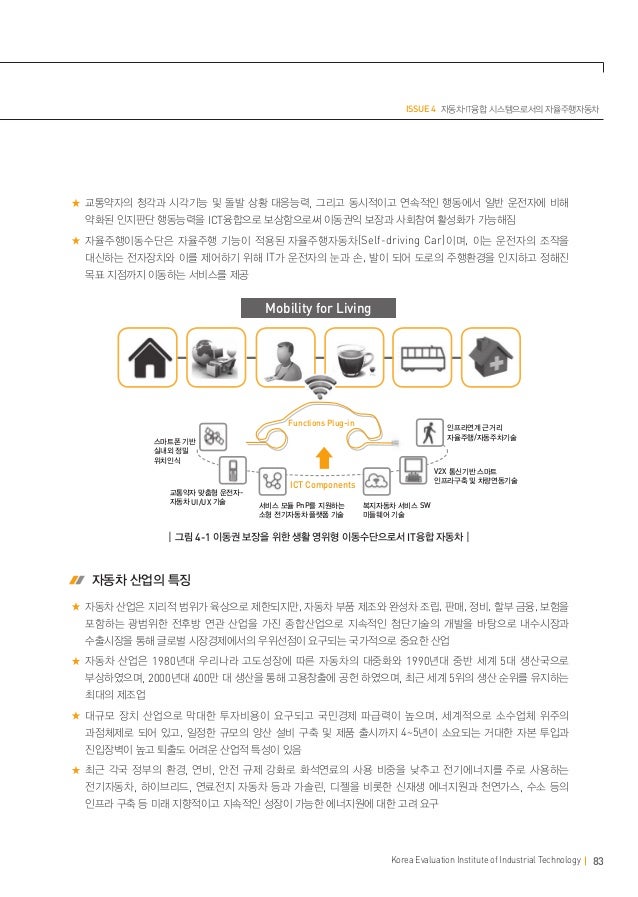
자율주행차의 주변 상황 인지 자율주행차가 주행 중 주변 상황을 인지하는 것은 자율주행의 출발점입니다. 주행 중인 도로의 차선, 보행자, 선행 차량, 고정 장애물 등을 인식해야 어떤 경로로 주행할지 판단하는 단계로 넘어갈 수 있습니다. 자율주행차가 주변 환경을 파악하고 정확한 정보를 습득하려면 차량에 장착된 카메라, 레이더(Radar), 라이다(Lidar) 등의 센서 기능을 활용하게 됩니다.
[그림 2] 차량 센서의 예에서 카메라는 인간의 눈과 가장 흡사합니다. 차선, 보행자 등을 광학계를 통해 영상으로 취득하고 후처리 과정을 거쳐 유용 정보로 추출합니다. 하지만 빛이 없으면 식별이 어렵듯이 광조건의 영향을 많이 받는 한계가 있습니다.
레이더(Radar-Radio Detection and Ranging)는 객체의 거리와 속도, 각도 등을 측정하기 위해 전자파를 사용하는 감지 센서입니다. 카메라에 비해 눈, 비 등 악천후에도 강하다는 장점이 있습니다.
라이다(Lidar-Light Detection and Ranging)는 레이더와 비슷하지만 빛을 이용하여 주변을 탐색합니다. 빛을 비춰 돌아오는 정보를 바탕으로 이미지를 그려 거리와 사물의 윤곽을 탐지하는 장비로 정확도가 높아 ‘자율주행의 눈’이라고도 불리는 센서입니다. 다만 날씨에 다소 취약한 경우가 있고 무엇보다 단가가 매우 높아 연구 목적 외 일반 판매용 자율주행차에 장착이 어려운 상황입니다.
이밖에 초음파 센서, GPS 등의 센서 등을 활용해 자율주행 인지가 이뤄집니다. 이들 센서의 개별 정보를 통합하여 차량 주변 환경에 대해 정확하고 신뢰할 수 있는 지도를 생성하는 개념이 센서 퓨전(Sensor Fusion)입니다. 센서별 장단점을 고려하여 다양한 날씨 조건과 빛 조건에서 주변 상황을 정확하게 인지할 수 있도록 센서로부터 취득하는 데이터를 적절히 조합하는 과정입니다. 센서 서로를 보완하는 기술은 물론 충분한 중복을 통해 중복을 증가시켜 안전을 개선하는 것도 중요한 부분입니다.
[그림3] 차량용 센서별 범위
인지 소프트웨어(이하 인지 SW)란 무엇인가?인지 SW는 자율주행 상황에서 차량 주변의 대상 객체를 인지하는 SW 알고리즘을 통칭합니다. 센서 퓨전 과정에서 센서로부터 취득되는 데이터를 적절히 조합하여 주변 상황에 대한 정확한 데이터를 산출하는 SW입니다. 이러한 인지 SW를 검증하고 성능을 평가하려는 연구가 활발히 진행되고 있습니다. 인지 SW 성능을 테스트하기 위한 영상 데이터셋과 오픈 소스를 제공하는 기관이 있는데 대표적으로 BDD(Berkley Deep Drive)와 KITTI가 있습니다.
[그림4] BDD(Berkley Deep Drive)와 KITTI
BDD는 10만 개 이상의 영상 데이터를 제공합니다. KITTI는 데이터량은 상대적으로 적지만 인지 SW의 KITTI data set 적용 결과를 제공합니다. 이외에도 바이두의 Apoloscape도 다양한 data set을 제공하고 있습니다.인지 SW 평가는 기존 컴퓨터 비전 분야에서의 이미지 인식 관련 평가 방법이 일반적으로 사용되고 있습니다. 평가용 영상에서 취득한 인지 결과의 GT(Ground Truth) 값과 시험 대상인 인지 SW가 검출한 결과(Predict) 간의 비교를 통해 객체 검출 정확도를 측정하는 방식으로 mAP(Mean Average Precision) 값을 지표로 합니다. 일반적인 Object Detection에서 사용하는 측정 지표로서 현재 대부분의 인지 SW가 이 지표를 더욱 높이는 데 집중하고 있습니다.
그러나 mAP 등은 기본적으로 화면상의 객체 검출에만 초점을 맞춘 지표입니다. 자율주행 상황에서는 더 고려해야 할 사항이 있고, 이를 위해 추가적으로 평가지표를 개발해 인지 SW의 명확하고 합리적인 검증을 해야 합니다. 기존 기능안전표준으로는 자율주행 차량에 대한 안전 검증이 충분하지 않아 국제표준화기구(ISO)가 자율주행 관련 표준을 꾸준히 발행하고 있으며, EuroNCAP과 같은 성능평가 프로그램도 ADAS를 넘어 자율주행 관련 시험 절차 등을 추가할 것으로 보입니다.
이러한 기술 트렌드에 부합하기 위해 슈어소프트테크에서도 이 부분에 대한 연구를 꾸준히 진행하고 있습니다. 다가오는 자율주행 시대를 대비해 자율주행 관련 SW를 검증할 수 있는 도구를 개발하고 솔루션을 제공하고 있습니다.
[출처] 그림 1-https://news.hmgjournal.com/Tech/Item/adas-01 그림 2-https://www.hyundai.co.kr/TechInnovation/Autonomous/ 그림 3-https://www.hyundai.co.kr/TechInnovation/Autonomous/ 그림 4-www.cvlibs.net/datasets/kitti/ ://https://bdd-data.berkeley.edu/http